Еще одним из простых и удобных в работе ограничивающих тел является так называемый k-DOP (Discrete Oriented
к/
Polytope) - пересечение у2 областей, заключенных между набором параллельных плоскостей фиксированной ориентации (рис. 3.12).
Направления нормалей для этих плоскостей заранее фиксируются, и потому для любых двух k-DOP нормали к соответствующим плоскостям совпадают. Поэтому работа с ними достаточно проста и сильно напоминает работу с ААВВ (на самом деле ААВВ является частным случаем k-DOP).
Такой объект описывается следующей формулой:
s=n;.,s„
Si={peRi:dr<(p,ni)<dr}.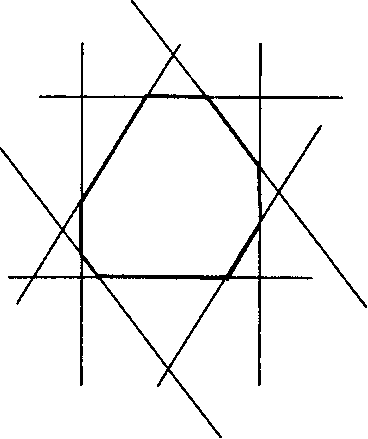
Рис. 3.12
(3.12)В этой формуле величины л, являются выбранными нормалями к плоскостям и фиксированы, а d™n и d™ІX определяют плоскости, между которыми лежит исходный объект, и, следовательно, зависят от него.
Еще одной часто встречающейся задачей является проверка пересечения луча с заданными телами.
Для начала мы рассмотрим пересечение луча с плоскостью (рис. 3.13).
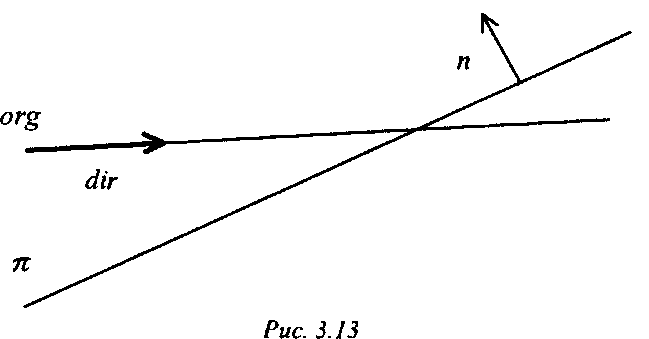
Пусть задана плоскость я "opengl6_50.html">⇐ Предыдущая| |Следующая ⇒