Подчините нуль-объекту, размещенному под выступом ступни, внешние целевые объекты лодыжки и центра ступни (рис. 4.80). В результате при вращении вокруг нуль-объекта ступня поднимется, однако пальцы останутся лежать на полу.
Разумеется, эту процедуру необходимо проделать для обеих ног. Подобные операции всегда следует выполнять отдельно для каждой стороны тела.
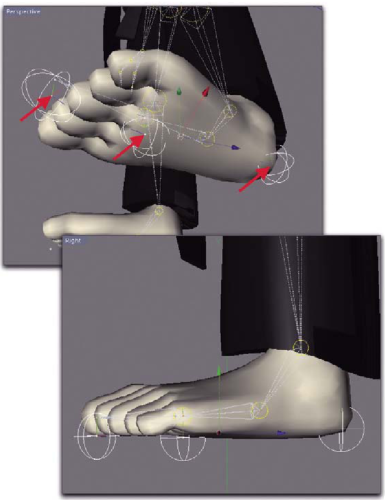
Рис. 4.79. Дополнительные нуль-объекты для ступни
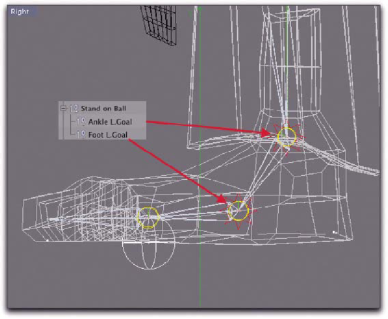
Рис. 4.80. Иерархия для вращения ступни Затем эта группа должна быть подчинена нуль-объекту, размещенному под кончиками пальцев (рис. 4.81). Также подчините этому нуль-объекту внешний целевой объект пальцев.
Наконец, почините нуль-объекту, расположенному под пяткой, нуль-объект, соответствующий пальцам, и нуль-объект полюсного вектора ноги (рис. 4.82). В результате при вращении нуль-объекта пятки контролируется направление колена и подъем ступни. Кроме того, при смещении пятки наклоняется вся нога.
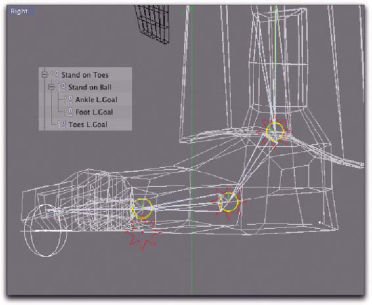
Рис. 4.81. Иерархия для того, чтобы персонаж мог стоять на цыпочках
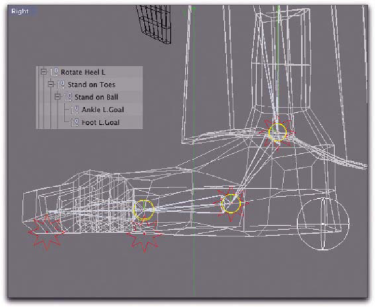
Рис. 4.82. Иерархия для пятки Создание анимации отдельно для этих объектов может привести к движению всей ноги.
Для того чтобы пальцы могли двигаться независимо от остальной части ступни, подчините их внешний целевой объект копии целевого объекта, соответствующего выступу ступни. Теперь пальцы можно поднимать и опускать путем вращения вокруг выступа.
Кроме того, данную группу следует подчинить пятке, чтобы при подъеме пятки перемещалась вся нога. Завершенная иерархия ноги показана на рис. 4.83.
Вспомогательные объекты рук Целевые объекты рук также необходимо организовать в группы, хотя эти группы и будут менее сложными, чем для ног.
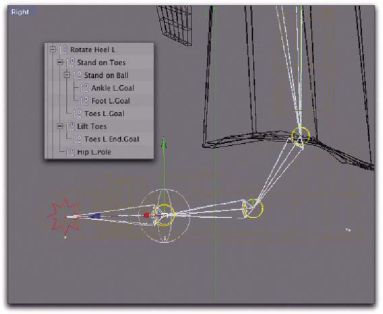
Рис. 4.83. Завершенная иерархия ноги Анимацию кисти и пальцев мы создадим позже с помощью других методик. Пока же займемся несколькими целевыми объектами плеча и предплечья.
Здесь необходимо создать три новых нуль-объекта. Один из разместите в позиции сустава груди, от которого кость идет к плечу.
Второй нуль-объект разместите в позиции плечевого, а третий - локтевого сустава.
Целевой объект для сустава кисти подчините новому вспомогательному объекту локтя. Исходный целевой объект локтя нэ-обходимо разместить под иерархией нового нуль-объекта плеча.
Соответствие между задействованными объектами и их иерархию можно увидеть на рис. 4.84. Здесь для лучшего пэ-нимания размещения суставов применены разноцветные метки.
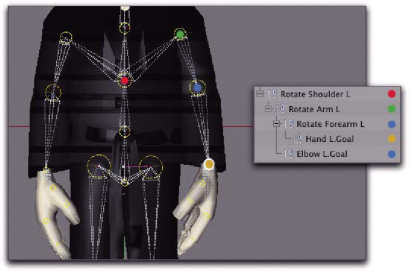
Рис. 4.84. Вспомогательные объекты руки Пусть читателя не смущает размещение рук на рис. 4.84 - они были умышленно опущены вдоль туловища перо наш для повышения наглядности иллюстрации.
А теперь посмотрим, каким образом вращение вспомогательных объектов приводит к деформации фигуры.
Деформатор Skin
Как читатель уже, наверное, заметил, суставы и кости можно перемещать путем вращения и перемещения вспомогательных и целевых объектов. Это возможно, благодаря назначению дескрипторов IK и IK-Spline.
Фактическая связь между суставами и дескрипторами Weight объектов может быть создана с помощью деформатора Skin (команда меню Character • Skin).
Он действует, как и другие, знакомые нам деформаторы, через подчинение. Это означает, что объект Skin для того, чтобы влиять на объект Null (который содержит фрагменты нашего персонажа), должен быть подчинен этому объекту (рис. 4.85).