Классический способ. Разбиваем искомый поворот на последовательность знакомых шагов:
1. Выполним два поворота таким образом, чтобы вектор и совместился с осью х.
2. Выполним г-вращение на угол В.
3. Аннулируем два совмещающих поворота для восстановления исходного направления вектора и.
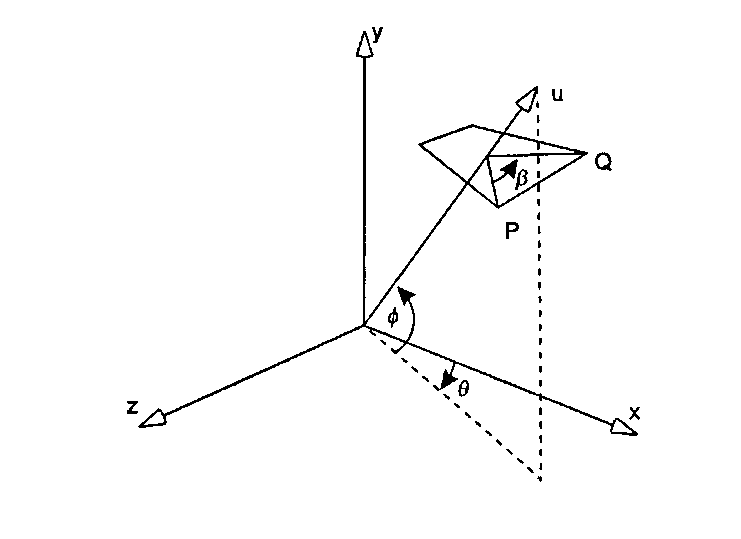
Рис. 5.28. Поворот вокруг оси, проходящей через начало координат
Этот метод напоминает поворот вокруг точки в двух измерениях. Первый шаг подготавливает условия для более простой и знакомой операции, затем эта простая операция выполняется, и, наконец, подготовительный этап аннулируется. Результат для трехмерного случая (он рассматривается в упраж1 Эта теорема иногда формулируется так"opengl1_327.html">⇐ Предыдущая| |Следующая ⇒