В данной главе были рассмотрены различные алгоритмы построения планировщиков. Как читатель уже смог понять, распределение процессорного времени в маршрутизаторе между очередями с различными приоритетами является нетривиальной задачей, приходится учитывать множество факторов, таких как, например, точность аппроксимации идеального алгоритма, вычислительную сложность алгоритма, параметры функционирования при различных нагрузках и т.д. Табл. 2.2 содержит исчерпывающую информацию по рассмотренным в данной главе алгоритмам построения планировщиков.
Существует также еще множество алгоритмов построения планировщиков, среди которых необходимо отметить следующие:
• CSFQ (Core-Stateless Fair Queuing) [Stoica98;
• PRQ (Priority Queuing) [RFC2211];
• CBQ (Class-Based Queuing) [CBQ02];
• RCSD (Rate Controlled Service Discipline) [Zhang94];
• SCED (Service Curve Earliest Deadline first) [Sariowan96], В связи с тем, что перечисленные алгоритмы, в основном, являются модификациями, подробно рассмотренных в данной главе, автор считает, что заинтересованный читатель в случае необходимости сможет сам освоить материал, для чего полезной будет имитационная модель алгоритма CSFQ, представленная на домашней странице его автораhttp://www.cs.berkeley.edu/~istoica/csfq/
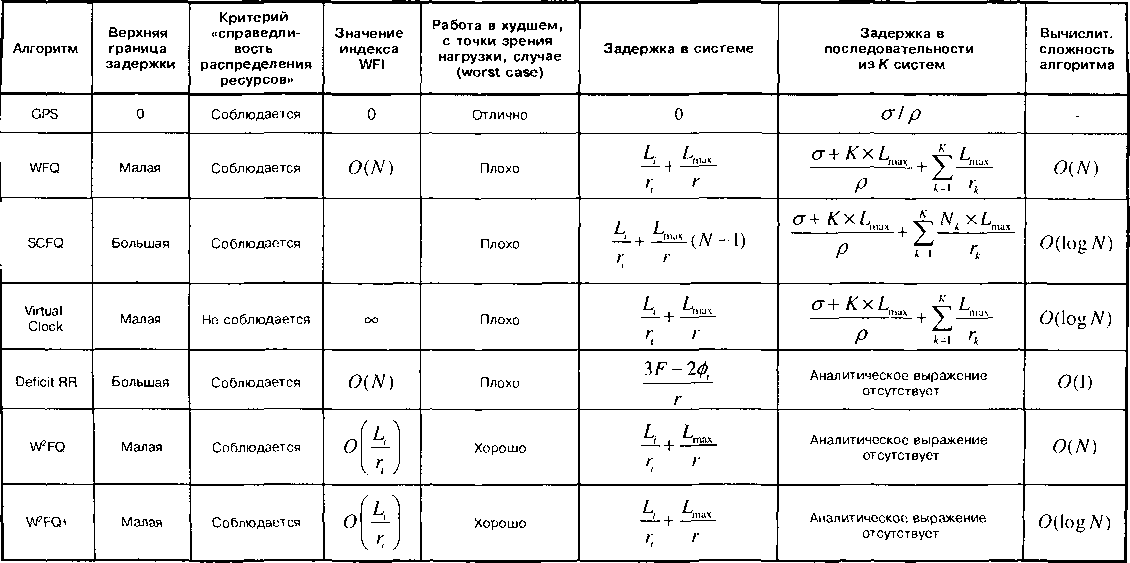
Примечание 1. Пол «малой» верхней границей задержки понимается аддитивная задержка постоянного характера большего размера, нежели задержка GPS при соблюдении критерия «справедливого распределения ресурсов» на уровне, сравнимом с GPS или SCFQ.
Примечание 2. Под «плохой» работой алгоритма в худшем, с точки зрения нагрузки, случае подразумевается случай, когда значение индекса WFI увеличивается с количеством потоков, конкурирующих в рамках рассматриваемой системы.
Примечание 3. В алгоритме DRR параметр F обозначает размер фрейма, а параметр ф(является весовым коэффициентом назначения размера полосы пропускания для потока /.
⇐Анализ pfq для последовательности систем | Управление трафиком и качество обслужевания в сети | Алгоритмы управления очередями⇒